���Ͱl(f��)���^�̿���ϵ�y(t��ng)
I-8421-G/I-8821-G (�����Ƴ�)CAN�����ֲ�ʽ��(sh��)��(j��)�ɼ�����ϵ�y(t��ng)
- �W(w��ng)�j����: Slave
- �e�`����: ��(ji��)�c�O(ji��n)ҕ
- PDO�Ĕ�(sh��)Ŀ: 16�����Ռ���, 16�����͌���
- PDO��ģʽ: �¼��|�l(f��),�h��Ҫ��,ѭ�h(hu��n)�ͷ�ѭ�h(hu��n)��ͬ����(sh��)��(j��)����
- PDO��ӳ��: ��׃��
- SDO�Ĕ�(sh��)Ŀ: 1����������, 0���͑���
- �o���¼�ӍϢ: ��֧Ԯ
- CANopen�汾: DS-301 v4.01
- ����Ҏ(gu��)��: DSP-401 v2.0
- �ӑB(t��i)�a��EDS�n��
- �ṩ�����ܛ���O������
- CANopenͨӍ����: 10K, 20K, 50K, 125K, 250K, 500K, 800K and 1M bps
- �ṩ���o�O����(ji��)�c��ַ�͂�ݔ����
- PWR, RUN��ERRָʾ��
- ֧�ֶ�NI-87K / I-8K ��ݔ����ģ�K��
- ֧���Ă�ģ�K���
Model 840-N4X���w̽�y������ϵ�y(t��ng)
KDJC-2000���Ԅ��C�z�|��ָ��(sh��)�y���x�����T��PLC����ĵ��������ϵ�y(t��ng)
���c��
�����ɶ�늄��\�ӿ���ϵ�y(t��ng)
| ����\���d�ɣ�GML�� | 3000��kg | �����Ͽ�� |
| X�S����D�ӑT�� | 5000��kg �O | ��Hexapod��܅��� |
| Y�S����D�ӑT�� | 5000��kg �O | ��Hexapod��܅��� |
| Z�S����D�ӑT�� | 5000��kg �O | ��Hexapod��܅��� |
| �d�����ģ�COG�� �xƽ�_�����ģ�MPC�� �ĸ߶� | 1000 mm | |
| ���ɶ� | �����ɶ�λ�� | �dž����ɶ�λ�� | ��λ | ||
| ��Сֵ | ���ֵ | ��Сֵ | ���ֵ | ||
| ǰ����� Surge | -0.49 | 0.61 | -0.65 | 0.65 | m |
| ���ғu�[ Sway | -0.50 | 0.50 | -0.69 | 0.69 | m |
| ������� Heave | -0.41 | 0.41 | -0.41 | 0.41 | m |
| �M�L Roll | -23.8 | 23.8 | -29.2 | 29.2 | deg |
| ���� Pitch | -23.8 | 26.1 | -28.5 | 32.8 | deg |
| ƫ�� Yaw | -25.5 | 25.5 | -29.6 | 29.6 | deg |
| ���ɶ� | �ٶ� | ���ٶ� | �Ӽ��ٶȣ��_���� | |||
| ǰ����� Surge | 0.8 | m/s | 6.3 | m/s² | 200 | m/s3 |
| ���ғu�[ Sway | 0.8 | m/s | 6.3 | m/s² | 200 | m/s3 |
| ������� Heave | 0.6 | m/s | 9.0 | m/s² | 200 | m/s3 |
| �M�L Roll | 37 | deg/s | 200 | deg/s² | 6000 | deg/s3 |
| ���� Pitch | 37 | deg/s | 200 | deg/s² | 6000 | deg/s3 |
| ƫ�� Yaw | 40 | deg/s | 400 | deg/s² | 12000 | deg/s3 |
| | �l�ʣ�Hz�� | ��λ�deg�� | ˥�p��dB�� |
| | 6 | 90 | 0 ~ -8 |
| �����l�� | ≥ 6 | | |
�����ʽ��λ����ϵ�y(t��ng)
�ߵ͜؞r�����ȃx@GB���ܿ���ϵ�y(t��ng)
ע��C����ϵ�y(t��ng)���z�Cе���пճ��͙Cе����ϵ�y(t��ng)
TMCTMCȫ�����\�ӿ���ϵ�y(t��ng)
|
| �f���� TMC ȫ�����\�ӿ���ϵ�y(t��ng)�����ӎ����N늙C�����܉F(xi��n)�]�h(hu��n)��ͬ���\�ӡ�ֱ�����a���A�����a�ȶ�N�\�ӹ��ܡ�TMC �aƷ���������������ģ�M�ɲ��֣��������ְ������C���ؙC���\�ӿ��ƿ��Ȏײ��֡�����ģ�M�������N늙C������������ |

����������Ҏ(gu��)�t��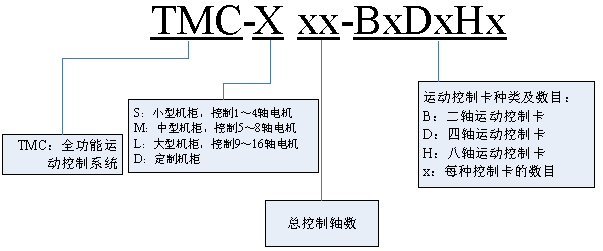 ���������̖�f����
���������̖�f����
| ��������̖ | ���� | �f�� |
| TMC-S��1��4��- BxDxHx | �˜ʹ��ؙC��С�͙C�� | 1��4�S�Ľ�Q������1���\�ӿ��ƿ��� |
| TMC-M��5��8��- BxDxHx | �˜ʹ��ؙC�����͙C�� | 5��8�S�Ľ�Q������1��2���\�ӿ��ƿ��� |
| TMC-L��9��16��- BxDxHx | �˜ʹ��ؙC�����͙C�� | 9��16�S�Ľ�Q������2��4���\�ӿ��ƿ��� |
| TMC-D��XX��- BxDxHx -xx | 16�S���ϻ��߿͑����Ƶ������� | ���ƽ�Q������ͨ���������Ҫ�ӿ͑����a�M�Ѕ^(q��)�֣� |
����ģ�M��Drive-Box����ÿһ���\�ӿ��ƿ�ԭ�t�Ͽ���ͬһ�N늙C��ԓ�\�ӿ��ƿ������Ӿ���һ��������ģ�M�ϣ�����ģ�M�ľ��aԭ�t�飺��̖��DBx-xxxx���x����һ��x����ͬһ�N늙C����ģ�K��(sh��)Ŀ�ڶ���xxxx����늙C���a���N���늙C�N�ͬ�r��ԭ�t�ϴ��a���M�л����a������S235 ������2 ��35 ���M늙CS242 ������2 ��42 ���M늙CS257 ������2 ��57 ���M늙CS357 ������3 ��57 ���M늙CS5xx ������5 �ಽ�M늙C��xx ����ASP1 �����������ŷ�늙C������100WASP2 �����������ŷ�늙C������200WASY1 �����������ŷ�늙C��������yaskawa��100W���ȵ�DSxx: ����ֱ���ŷ���xx ����LTRx ������TR ��ֱ��늙C��x ����LTEx: ����TE ��ֱ��늙C��x ����LDDx ������ֱ�늙C��DD �R�_����x �����e�f�����������a�У��в�����������ͨ�ã��磺2��57늙C�����������¼���42늙C��TR/TE��ֱ��늙C����ͬDD������ͬ�����������O�ÿ��ܲ�ͬ�����h�ڳ�؛ǰ�_�J������늙C��̖��
| �x���e��һ�� �����䣺TMC-M6-B1D1 ����ģ�M��DB4-S357��DB2-S5xx ���x��������Ҫ����6�S���������͙C��2���\�ӿ��ƿ��� һ����2�S�\�ӿ��ƿ���һ����4�S�\�ӿ��ƿ���������4��3�� ���M늙C������2��5�ಽ�M늙C������ �x���e������ �����䣺TMC-M7-D2 ����ģ�M��DB4-S357��DB3-S357 ���x��������Ҫ����7�S���������͙C��2��4�S�\�ӿ��� ����������7��3�ಽ�M늙C�������� ���ڸ��S��늙C��ͬ��������1��8�S���\�ӿ��ƿ����������� ����׃���飺 �����䣺TMC-M7-H1 ����ģ�M��DB7-S357 �x���e������ ij�͑��x��18�S�\�ӿ���ϵ�y(t��ng)������5�S��͑��Լ��İ��� 200W�����ŷ�늙C������������13�S�քe�飺 �� 5�S2��42���M늙C �� 1�S2��57���M늙C��ע����������42늙C�� �� 1�S3��57���M늙C �� 2�S���aֱ��늙C��ע����������DD�R�_�� �� 2�S�����ŷ�����100W �� 2�SDDR���D�_ ���ҿ͑�Ҫ�� �� ֱ��늙C��2�S����DD�R�_��2�S��Ҫ��ͬ����ֱ�����A���� �a�� �� 5�S2��42���M늙C��1�S2��57���M늙CҲҪ��ͬ����ֱ �����A�����a�� ����(j��)ԓ�͑���Ҫ���҂��_�����ú���̖�� ��һ�����҂��ȁ�������ģ�M�Ę��ɣ� 1. DB5-ASY2C0��5����5�S��ASY2�鰲�������ŷ�200W�� C0�����͑��Լ��ṩ���������ṩ����������Ҫ���侀 �A���ã��Ա�͑��յ�TMC��Ӿ����������ʹ�� 2. DB5-S242��5�S2��42���M늙C 3. DB1-S257��1�S2��57���M늙C 4. DB1-S357��1�S3��57���M늙C 5. DB2-LTR1��2�S���aֱ��늙C 6. DB2-ASP1��2�S����100W�����ŷ� 7. DB2-DDR1��2�SDD�R�_ �ڶ������x���\�ӿ��ƿ��� ԭ�����εķ������x��7���\�ӿ��ƿ������ǿ��ܴ��ڎׂ��� �}�� �� ���ؙC�Л]������IJ�ۡ� �� �͑�����Ҫͬ������a�\�ӵ�늙C����÷���һ���\�ӿ� �ƿ��ϡ� | �����������}���҂����]�� �� ��2헣�5�S���͵�3헣�1�S�����Թ���һ��8�S���\�ӿ��ƿ��� �� ��5헣�2�S���͵�7헣�2�S��Ҳ���Թ���һ��4�S���\�ӿ��ƿ��� ���ԣ��҂����x��5���\�ӿ��ƿ��ķ�ʽ�� �� 2��8�S���͑���5�S�ŷ�늙Cһ����6�S���ಽ�M늙Cһ���� �� 2��2�S�\�ӿ��ƿ���3�ಽ�M�������ŷ��� �� 1��4�S�\�ӿ��ƿ���ֱ��늙C��DD�R�_�� ��K���҂����]����̖�飺 �����䣺TMC-D18C5-B2D1H2-xxx���͑����a�� ����ģ�M�� 1. DB5-ASY2C0��5�S�͑������ṩ늙C������������ �����ŷ�200W늙C����Ҫ��þ��� 2. DB5-S242��5�S2��42���M늙C 3. DB1-S257��1�S2��57���M늙C 4. DB1-S357��1�S3��57���M늙C 5. DB2-LTR1��2�S���aֱ��늙C 6. DB2-ASP1��2�S����100W�����ŷ� 7. DB2-DDR1��2�SDD�R�_ 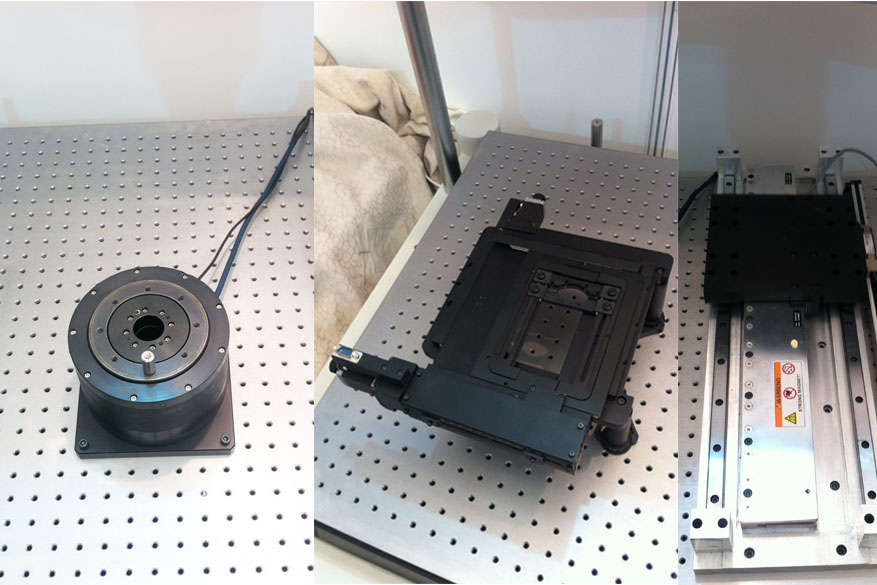 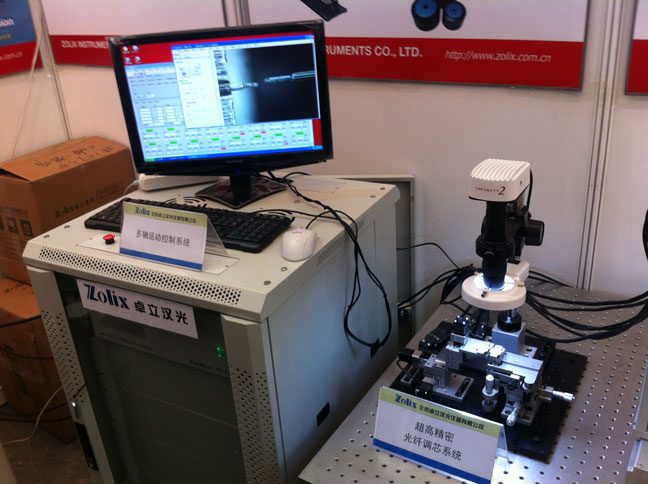  |
TMCȫ�����\�ӿ���ϵ�y(t��ng)�����ؽ��棺
| �����\�ӿ��ƽ��棺 �Ñ������x����Ҫ���Ƶ��\�ӿ��ƿ������8 ��������Ҳ�����x����Ҫ���Ƶ�늙C�S��ÿ�������8 ���S����֧��ͬ�r�x�����늙C�S��ͬ�r������늙C�S�M�п��ơ������\�Ӱ������L�\�ӡ��B�m(x��)�\�ӡ��^��λ���\�ӡ����a�\�Ӱ������Sֱ�����a�����Sֱ�����a���A�����a�� |  | |
| �O�ý��棺 �O�ý��淽��ֱ�^���Ñ�ֱ���x������_����̖���Ϳ��Ԍ���ԓ������_�Ļ�������(sh��)�����ٶȿ�����Ҫ�Ñ�����(j��)���H��Ҫ�O�����⣬��������(sh��)��������Ҫ�O�á� | 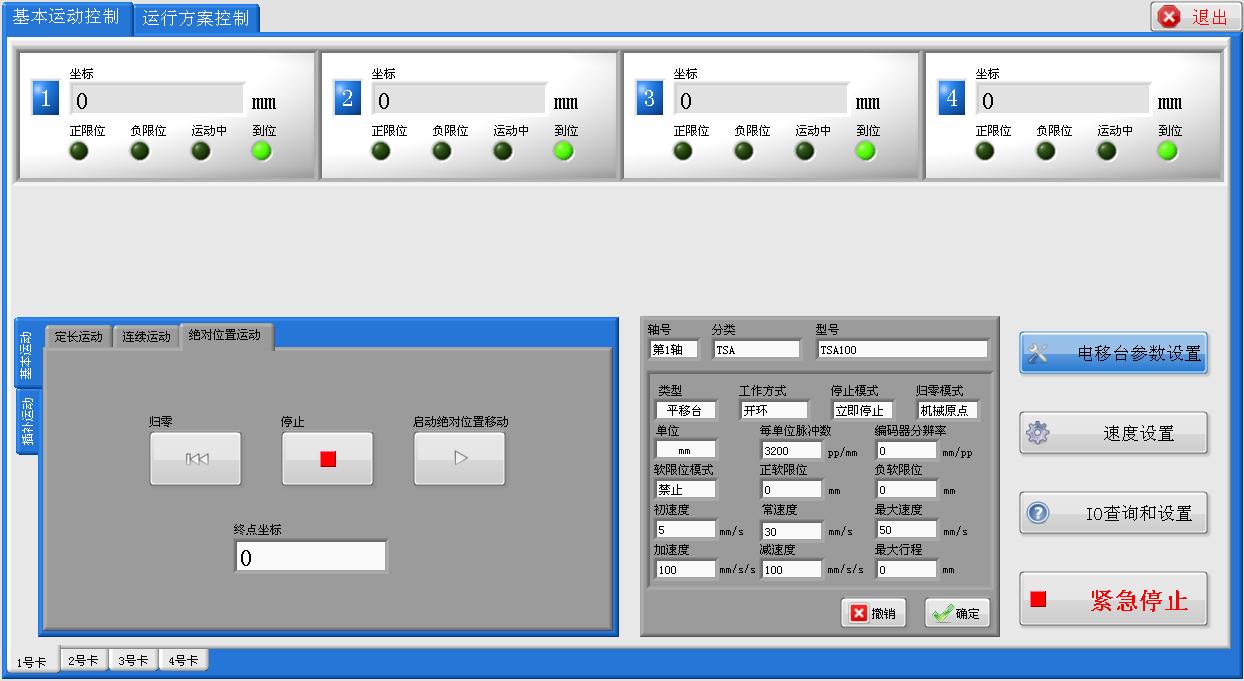 | |
| �\�з������ƽ��棺 �\ �з�������������Ҫ�M�Џ��s�ĽM��ָ�����̿��ơ��Ñ��o��ӛס���P�Ŀ���ָ�����ֱ�ӏIJˆ����x������Ҫ��ָ����뷽�����ɡ�֧�֗l����ѭ�h(hu��n)���ȴ��� �ӕr�����̿���ָ�C �Z�Կ����L��֧������ָ���Ƕ�ס����֧��ͬ�r�\���Ă�����������̎�����������档���ԝM����N���s�Ŀ�����Ҫ�� |  |
NCS4000 �W(w��ng)�j������ϵ�y(t��ng)
һ�� NCS4000 �W(w��ng)�j������ϵ�y(t��ng)����
����NCS4000 �W(w��ng)�j������ϵ�y(t��ng) �� ��һ���ֲ�ʽ�W(w��ng)�j������ϵ�y(t��ng) ���m�����С���Ҏ(gu��)ģ���I(y��)���ƭh(hu��n)���� ���ṩ�^�̿��ơ�߉���ơ���̎�����Ƶȏ��s���ƹ��ܡ�
NCS4000 ����ϵ�y(t��ng)�����������c��
• ֧���С���Ҏ(gu��)ģ����ϵ�y(t��ng)���ã������B������ 8192 �c��������� I/O �c��(sh��)��
• ֧����̫�W(w��ng)�����I(y��)��̫�W(w��ng)�� HSE ���� EPA �˜ʣ�
• ֧�� FF �� Profibus DP �� AS-I �� HART �ȶ�N�F(xi��n)�������˜ʣ�
• ֧�ֿ��������ࡢ�W(w��ng)�j���ࡢ I/O ģ�K���ࡢ�Դ����ȶ�N���ʽ��
• ֧���O��������\���c�S�o���ܣ�
• ֧�ֲַ�ʽ�M�B(t��i)���x���M�B(t��i)������ȶ�N���ܣ�
• ֧�� IEC61131-3 ���̘˜ʣ�
• �_�ŵĔ�(sh��)��(j��)�L���ӿڣ�֧�� OPC �˜ʣ�
• �����^�̿��Ƽ��g���ṩ�ИI(y��)��Q������
���� NCS4000 �W(w��ng)�j������ϵ�y(t��ng)�� NCS4000 ����վӲ���Y��2.1ϵ�y(t��ng)�Y�� ���� NCS4000 �W(w��ng)�j������ϵ�y(t��ng) �����όӹ������˙C�ӿڣ�������վ���F(xi��n)���O�����ӽY�������ЬF(xi��n)���O��������ϬF(xi��n)������ͨ�Ņf(xi��)�h�˜ʵ����܂�������׃��������(zh��)�������������y(t��ng)�x����ģ�M��̖�ȡ�